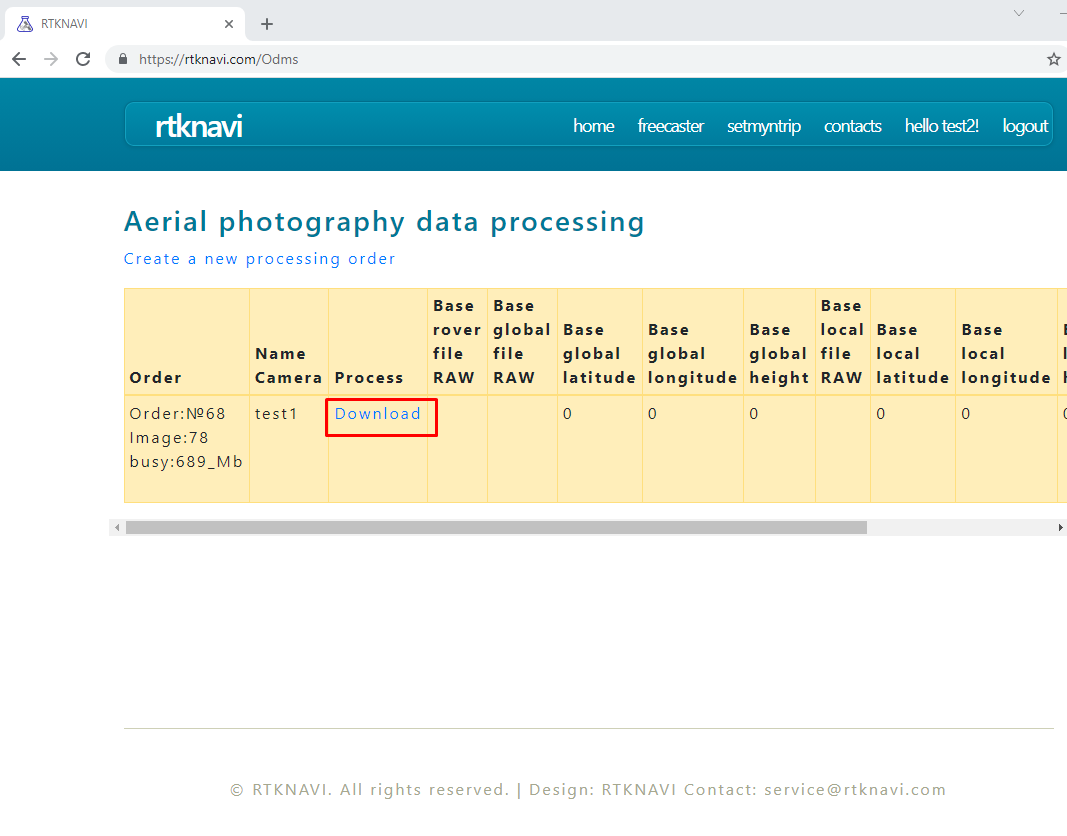
set orthomosaics
Terms:
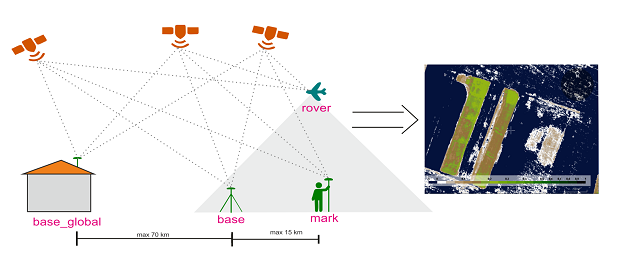
base_global is a stationary base within a radius of up to 50 km with known coordinates, statics
base - device for recording L1 or L1L2 data, statics (used for more accurate and stable processing and control, for this purpose it should be in the area of photography is not quite from the edge)
mark- data of markers on the ground for calibration and control, statics
rover- data of copter, airplane with events, kinematics
Support formats: RTCM 2, RTCM 3, Novatel OEM6, comnav, U-Blox, Swift Navigation SBP, Hemisphere,
SkyTraq, GW10, Javad, NVS BINR , BINEX, Trimble RT17, Septentrio, TERSUS, LEX Receiver
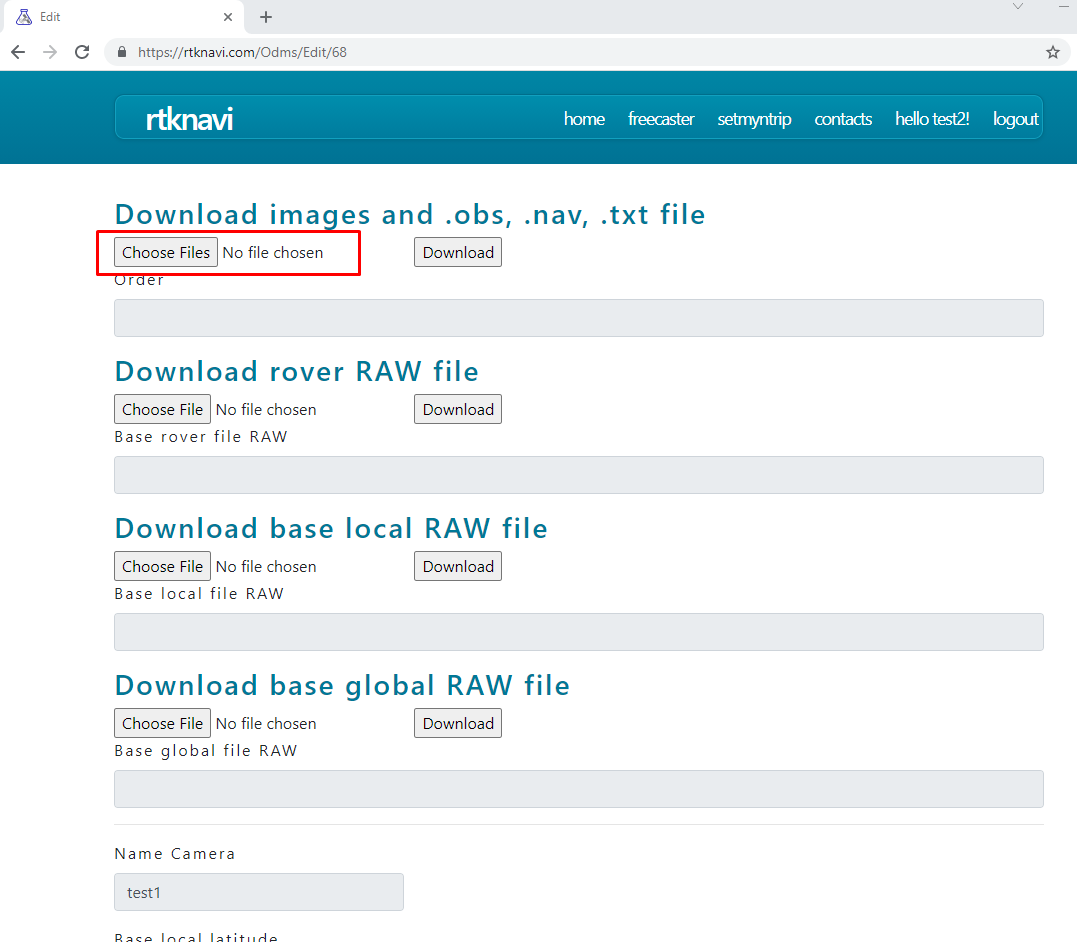
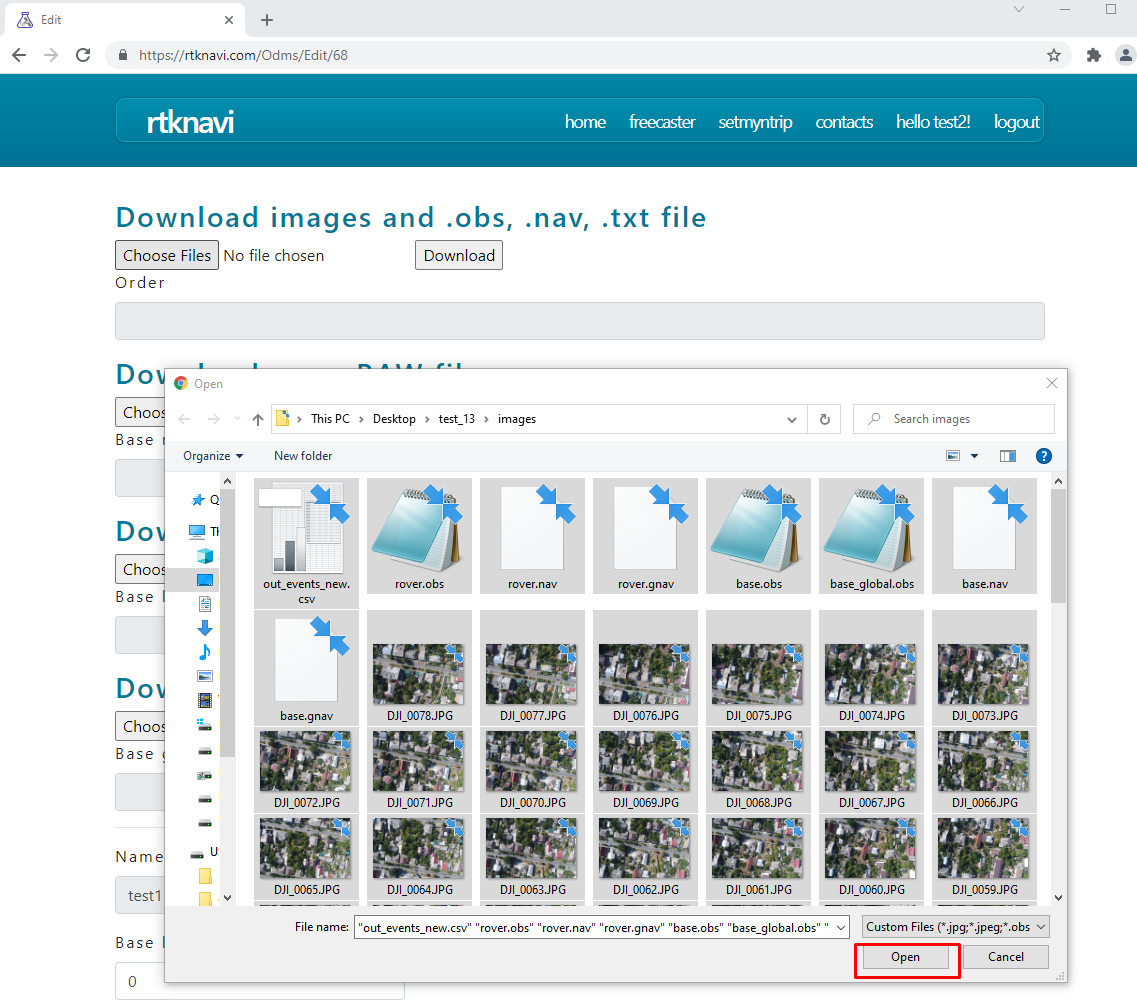
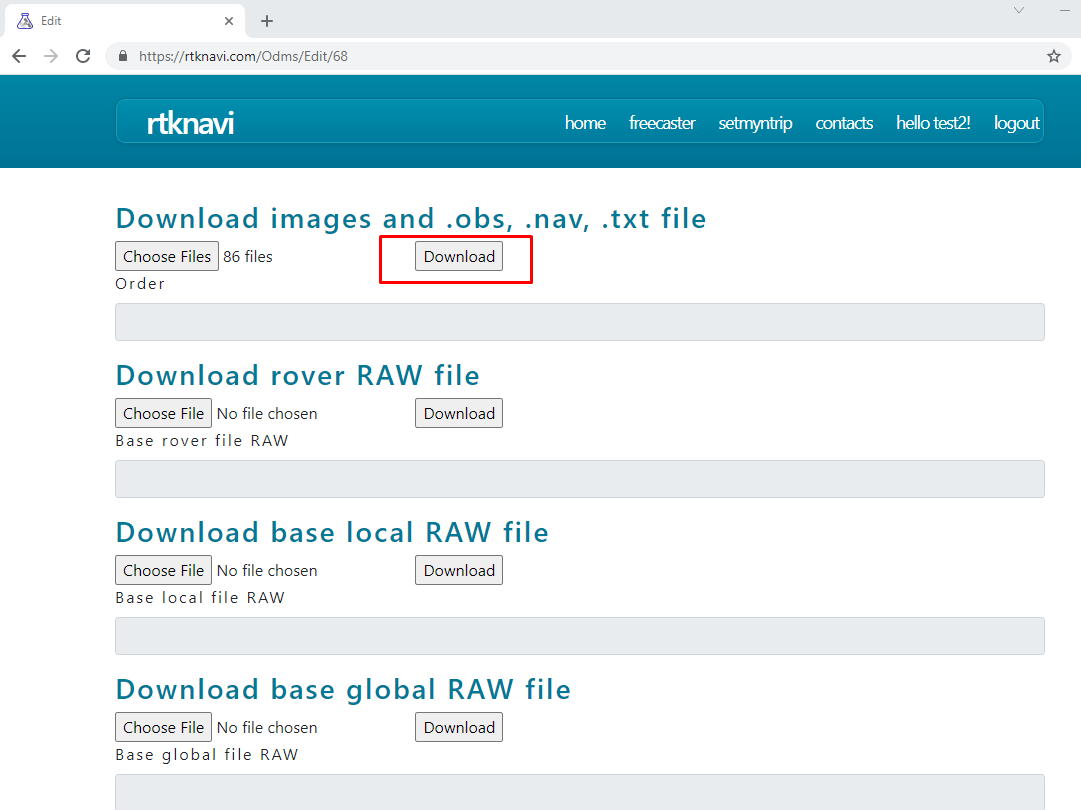
Imported files must be in the following format:
-images .jpg, .jpeg
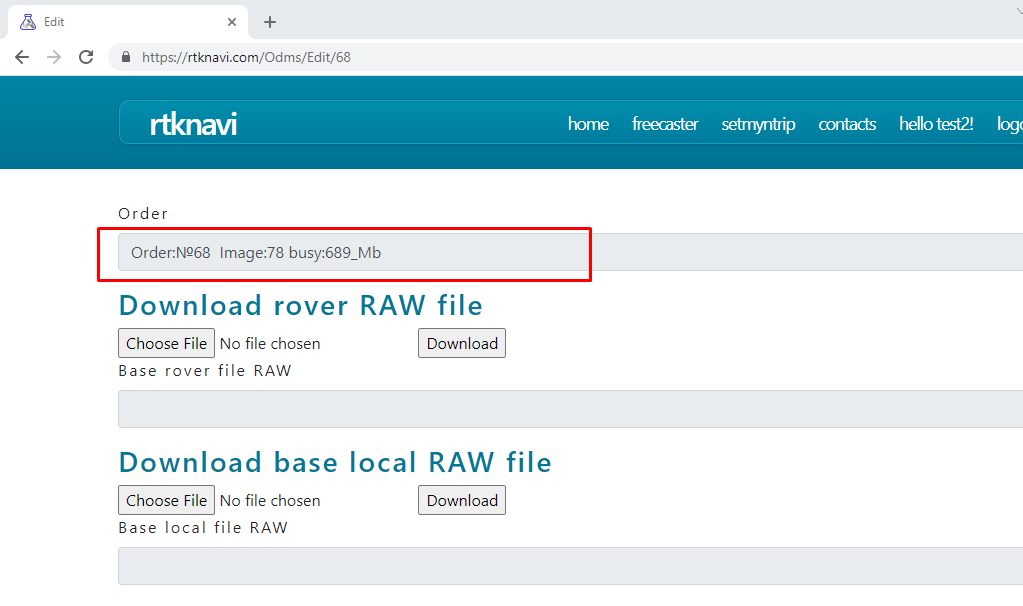
-the file from the global base station to download "all at once" should be renamed:
-raw data regardless of the format in the base_global.txt or downloaded through the appropriate menu
- Rinex files version 2.1 in base_global.obs
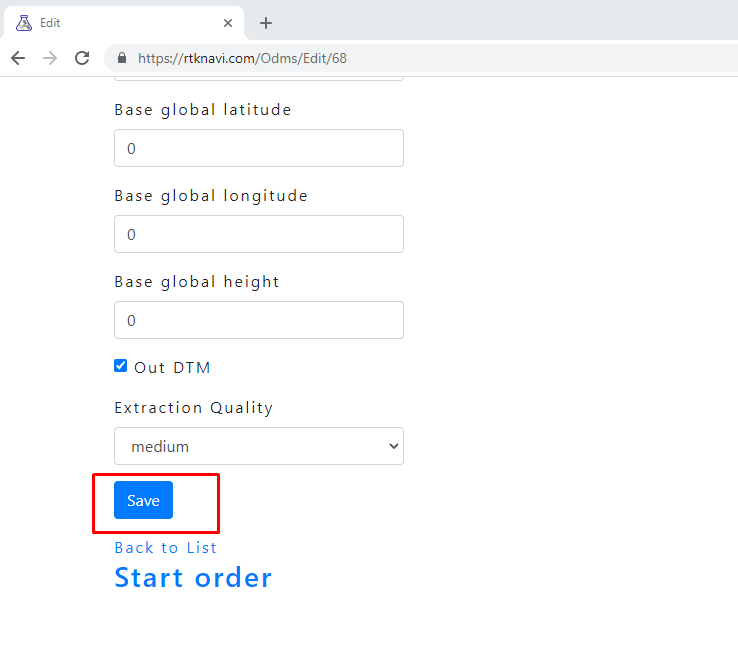
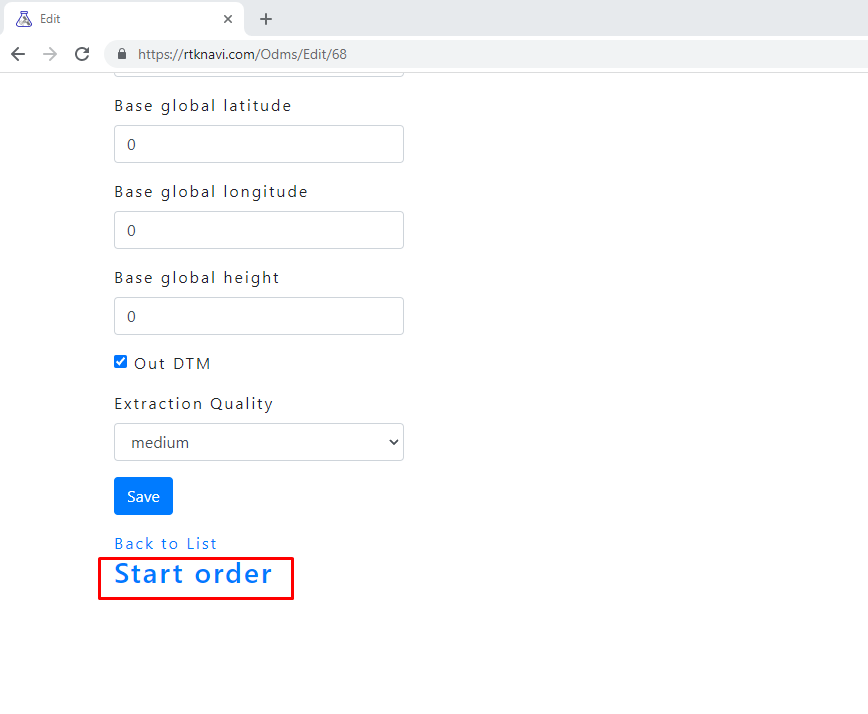
-you can enter known coordinates in lat long h format for example 42.32444 43.7776763654 123.345
-the file from the local base station to download "all at once" should be renamed:
-raw data regardless of the format in the base.txt or loaded through the appropriate menu,
-Rinex files version 2.1 in base.obs , base.nav - GPS, base.gnav -Glonass, base.cnav -Beidou, base.qnav -QZSS,
base_local.inav -IRNSS base_local.lnav -Galileo
-you can enter known coordinates in lat long h format for example 42.32444 43.7776763654 123.345
- markers files should be renamed:
-raw data regardless of format in mark_***.txt where *** - 001, 002, 023, etc.
-Rinex files version 2.1 in mark_***.obs , mark_***.nav etc
-the file from the copter to download "all at once" should be renamed:
-raw data regardless of format in rover.txt or downloaded through the appropriate menu
-Rinex files version 2.1 in rover.obs, rover.nav, etc.
File processing scheme:
-if there are only photos, the coordinates from EXIF will be used
-*.txt files converted to Rinex
-if after conversion there is base_global.obs , base.obs, mark_***.obs, rover.obs:
first, the statics relative to the global base -local base and markers are processed, if the local database solution is fixed then
when processing the rover, these coordinates are used, if there are entered coordinates - then they, if there are no - then autonomous.
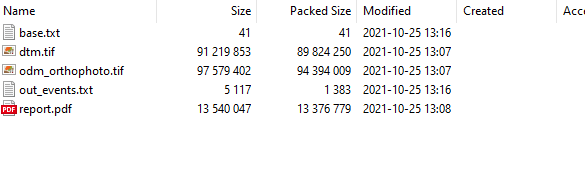
In the processing report in the base.txt the coordinates of the processed database and markers, it is convenient to use it to check accuracy.
For example, by opening the resulting GeoTIFF in QGIS and loading the base.txt file with coordinates
-if after conversion there is base.obs, mark_***.obs, rover.obs:
markers are processed from the local database so the time intervals should coincide (for example: the local database records, fly a copter and then they also make static measurements on L1 at least 20 minutes on the marker if both the base and the L1L2 rover then 5 minutes minimum)
-scanned and compared photos with the coordinates of events (timestamps of the camera shutter operation matching algorithm allows up to 30% absence or unnecessary photos or events
-the final file of the out_events_new.csv is formed you can create it manually and only photos and this file are required to process the orthophoto
sample file:
EPSG:4326
DJI_0001.JPG 26.252445527 49.986253357 238.4708 0 0 1 0.01 0.01
DJI_0002.JPG 26.252725159 49.98619621 237.2716 0 0 1 0.01 0.01
DJI_0003.JPG 26.252989898 49.986139002 236.6195 0 0 1 0.01 0.01
where EPSG:4326 is the WGS84 coordinate system
0.01 - expected accuracy of coordinates
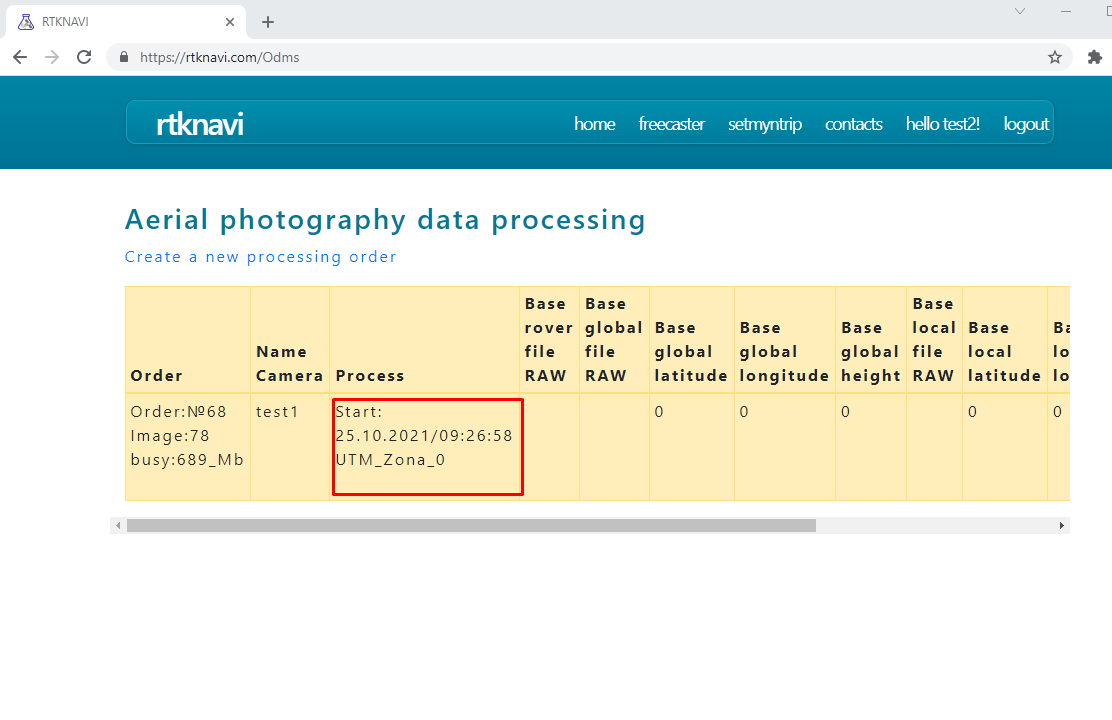
When you run the first two processing with the same camera name or reprocess the job,
for example for a copter with the camera name "test1" the camera is automatically calibrated and this calibration is not changed,
if you create a processing job with that name. Therefore, the first processing should contain a variety of information (roads, curbs, road markings, etc.)
Check the results of processing by placing the base in the shooting area and markers.
If the accuracy does not suit you, try again with a new camera name or manual calibration is required (contact the site administrator)